
 2016 10 03. JAV Raytheon Company suprojektavo ir pradėjo gaminti naujos klasės radarą AT/TPY-2 .
2016 10 03. JAV Raytheon Company suprojektavo ir pradėjo gaminti naujos klasės radarą AT/TPY-2 .

Šis radaras naudojamas didelio nuotolio priešraketinės gynybos sistemose.
Raytheon to start transition to production planning of Gallium Nitride technology for AN/TPY-2 radars
TEWKSBURY, Mass., Sept. 30, 2016 /PRNewswire/ — The U.S. Missile Defense Agency has awarded Raytheon Company (NYSE: RTN) a contract modification to develop a transition to production process to incorporate Gallium Nitride, or GaN, components into existing and future AN/TPY-2 radars. This initial effort will support the transition from Gallium Arsenide to GaN technology, which would further modernize the ballistic missile defense radar and drive down system obsolescence.
Radarų trigonometrijos modeliai. Kas geriau: Teiloro eilutės, Volters CORDIC iteracijų algoritmas, ar Donaldo h-geometrija ?
Dr. Donaldas Zanevičius
Jeigu paskaityti straipsnius ir knygas skirtas radarų vystymo istorijai, tai pamatysime, kad buvo pastoviai vystomos dvi pagrindinės darbų kryptys: naujos elektroninės aparatūros (generatorių, kompiuterių bei antenų) kūrimas ir radarų matematinių modelių tobulinimas. Išleista visa eilė monografijų ir daugybė straipsnių nagrinėjančių šias problemas.
Kaip ir kitose naujausios technikos sričių, radaruose plačiai naudojamos trigonometrinės funkcijos arba trigonometrinės lygtys. Klasikinės trigonometrijos funkcijos sin ir cos turi viena labai nepatogią savybę: jos neturi analitinių išraiškų. Todėl jau keliolika šimtmečių skaičiavimams buvo naudojamos lentelės, kuriose yra duodamos šių funkcijų skaitmeninės reikšmės kintant kampo dydžiui, kuris yra matuojamas laipsniais, minutėmis ir sekundėmis arba radianais. Vėliau buvo sugalvotas būdas kaip šias funkcijas skaičiuoti naudojant Teiloro eilutes. Trigonometrinės funkcijos labai plačiai naudojamos ir kitose mokslo ir technikos srityse – pavyzdžiui robototechnikoje, geodezijoje, astronomijoje ir kitose. Sprendžiant trigonometrines lygtis atsiranda problemos kaip išspręsti lygtis. Čia ir Teiloro eilutės nebepadeda. Tokiu atveju dažniausiai naudojamos įvairios aproksimacijos ir iteraciniai skaičiavimo būdai. Kuriami specialūs iteraciniai metodai.
Radarų problemos užima ypatingą vieta, kadangi radarai yra plačiai naudojami armijoje, kada reikia nustatyti skrendančio lėktuvo ar raketos koordinates. Todėl čia skiriami dideli pinigai ir pritraukiamos stipriausios mokslininkų jėgos. Jack E. Volder 1956m. pasiūlė [1] iteracijų algoritmą CORDIC (Coordinate Rotation Digital Computer). CORDIC iteracijų algoritmui realizuoti, gaminamos specialios mikroschemos (FPGA).
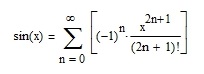
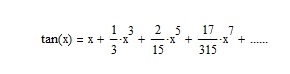
Tačiau grįžkime prie klasikinių trigonometrinių funkcijų sin ir cos. Kadangi šios funkcijos analitinių išraiškų neturi, tai dažniausia jų skaitmeninės reikšmės surandamos pasinaudojus Teiloro eilutėmis.
 (1)
(1)
 (2)
(2)
Čia x yra kampo dydis išreikštas radianais. Skaičiuojant trigonometrines funkcijas arba trigonometrinių lygčių sistemas atsiranda dvi problemos:
– Begalinių eilučių skaičiavimas užima daug kompiuterinio laiko, todėl naudojamos įvairios aproksimacijos, kas leidžia sutrumpinti kompiuterio skaičiavimo laiką, bet už tai prarandamas skaičiavimo tikslumas.
– Trigonometrinių lygčių sistemos negalima privesti prie tokios formos, kad galima būtų skaičiuoti skaitmeniniu būdų, net kompiuterio pagalba, todėl kuriami įvairūs iteraciniai metodai, kurie leidžia skaičiuoti su kompiuteriu skaitmeniniu būdų.
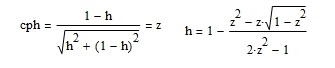
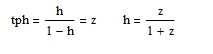
Mes siūlome naudoti h – geometrijos funkcijas sph, cph, tph.
h – geometrijos principai.
Siūlome pereiti prie visai naujo kampų matavimo metodo. Kampo dydį matuoti ne laipsniais, minutėmis ir sekundėmis (vėliau perskaičiuojama į radianus) , o h – parametrai [2],[3]. Todėl mes naudojame h – geometrijos sąvoką. Kaip žinia, klasikinėje trigonometrijoje, pradžioje kampo dydis laipsniais ir funkcijos sin ir cos nustatomas pasinaudojus apskritimo vienu ketvirčiu. Čia kampo dydis gali kisti nuo 0 iki 90 laipsnių. Mūsų siūlomoje h – geometrijoje kampo dydis kinta nuo 0 iki 1. Tada sinusas, kosinusas ir tangentas bus žymimi sph, cph, tph, kur
 (3)
(3)
 (4)
(4)
 (5)
(5)
Čia pateiktos visų trijų funkcijų ir jų atvirkštinių funkcijų analitinės išraiškos. Pereinant nuo vienos kampo matavimo sistemos prie kitos, naudojamos ryšio formulės.
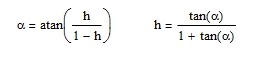 (6)
(6)
Pasinaudodami šiomis formulėmis, pateiksime keletą pavyzdžių, kaip atrodo matematiniai modeliai, kada naudojamasi h-geometrijos funkcijomis ir kaip tuo atveju skaičiuojamos funkcijos ir lygtys.
Pavyzdys 1. Trigonometrinės funkcijos.
Kad geriau suprasti h-geometrijos funkcijų panaudojimo būdus, pradžioje pateiksime paprasčiausia, būdinga radarų kompiuteriuose sprendžiamą, uždavinį [4]. Du radarai (arba vieno radaro dvi antenos) turi nustatyti atstumą r, jeigu žinomi trys –(α,β,γ) kampai ir vienas atstumas B. Formulė užrašoma
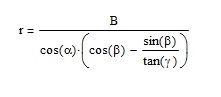 (7)
(7)
Skaičiuosime naudodamiesi klasika.
Skaičiuojant šią formulę (7) trigonometrinės funkcijos sin,cos,tan pateikiamos kaip begalinės eilutės (1),(2) ir
 (8)
(8)
Priklausomai nuo reikiamo skaičiavimo tikslumo, visada daromos tam tikros aproksimacijos. Pasirenkamas baigtinis begalinės eilutės narių skaičius. Paimkime konkretų pavyzdį. Duota
![]() (9)
(9)
Skaičiavimus atliksime kompiuterio pagalba, kuris be abejo skaičiuoja pasinaudodamas Teiloro eilutėmis.
Gausime
![]() (10)
(10)
Skaičiuosime naudodamiesi h – geometrijos modeliais.
Duotą matematinį modelį (7) parašyta klasikinės trigonometrijos funkcijomis sin ,cos, tan, parašykime jau su funkcijomis sph, cph, tph (3), (4), (5). Kadangi funkcijos turi analitines išraiškas, tai galėsime kai ką suprastinti ir sutvarkyti. Vietoje (7), gausime
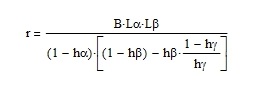 (11)
(11)
kur
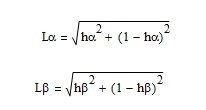
Čia jokių begalinių eilučių nėra. Suskaičiuoti (11) galima su paprastu kalkuliatoriumi.
Paimkime tą patį pavyzdį. Tik čia kampai bus matuojami h-parametrais.
![]() (12)
(12)
Įstačius h reikšmes (12) į (11) gausime
![]() (13)
(13)
Kaip matome skaičiavimo rezultatai, kaip gauti naudojantis klasikinės trigonometrijos matematiniais modeliais , taip ir naudojantis h-geometrijos matematiniais modeliais pilnai sutampa ( devynių ženklų po kablelio tikslumu). Tačiau kompiuterio skaičiavimo laikas (jeigu tai skaičiuojama su kompiuteriu), naudojantis h-geometrijos modelius būna 5-7 kartus mažesnis nei skaičiuojant naudojantis klasikinės trigonometrijos modeliais. Be to, ryškiai sumažėja reikalavimai skaičiavimo prietaisui ar kompiuteriui.
Todėl siūlome naudoti h – geometrijos matematinius modelius, vietoje matematinių modelių, kuriuos jau keliolika šimtmečių siūlo klasikinė trigonometrija.
Pavyzdys 2. Trigonometrinių lygčių sistema
Radaruose sprendžiamuose uždaviniuose dažnai tenka perskaičiuoti koordinačių dydžius, kada pereinama nuo vienos koordinačių sistemos prie kitos koordinačių sistemos. Matematiniai modeliai, kada naudojamasi klasikinės geometrijos funkcijomis sinα ir cosα yra gerai žinomi.
![]() (14)
(14)
![]() (15)
(15)
 (16)
(16)
 (17)
(17)
 (18)
(18)
Paimkime pavyzdį. Duota
Pasinaudojus formulėmis (14)-(18) gausime
![]() (19)
(19)
![]() (20)
(20)
![]() (21)
(21)
Atvirkštinis uždavinys.
![]() (22)
(22)
 (23)
(23)
![]() (24)
(24)
![]() (25)
(25)
![]() (26)
(26)
Lygčių (22)-(26) sistemos tiesiogiai kompiuteriu išspręsti negalima. Šių lygčių sistemos skaičiavimams sukurta daug įvairių specialių metodų. Tačiau jie visi remiasi apytiksliais arba iteraciniais metodais.
Skaičiuosime naudodamiesi h – geometrijos modeliais.
Pradžioje užrašykime pradinę lygčių sistemą (14)- (18), bet jau naudojantis h-geometrijos funkcijomis
![]() (27)
(27)
![]() (28)
(28)
![]() (29)
(29)
kur
 (30)
(30)
Pasinaudojus (27)-(30) gausime
![]() (31)
(31)
![]() (32)
(32)
![]() (33)
(33)
Kaip matome, skaičiavimai h-geometrijos pagrindu (31), (32), (33) , sutampa su skaičiavimais naudojantis klasikinės trigonometrijos funkcijomis (19), (20), (21).
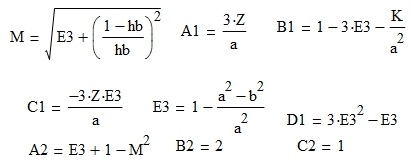
Uždavinys 2. Žinomos X,Y,Z reikšmės. Reikia surasti kampų dydžius matuojamus h – parmetrais hB, hL, hH. Iš (27) – (30) gausime dvi algebrines lygtis
![]() (34)
(34)
![]() (35)
(35)
kur
Įstatę žinomas reikšmes, gausime
![]() (36)
(36)
Ryšys tarp h-parametrų ir radianų nustatomas
 (37)
(37)
Mūsų atveju (37), gausime
![]() (38)
(38)
Kaip matome, rezultatai pilnai sutampa. Skirtumas tas, kad vietoje transcendentinių lygčių sistemos
(22) – (26) kurias galima suskaičiuoti tik iteracijos metodais, naudojantis h – geometrijos matematinius modelius, gauname dviejų algebrinių lygčių sistemą (34), (35), kur skaičiuojasi paprastai.
Literatūra.
- 50 Years of CORDIC: Algorithms, Architectures and Applications
Pramod K. Meher, Senior Member, IEEE, Javier Valls, Member, IEEE, Tso-Bing Juang, Member, IEEE, K. Sridharan, Senior Member, IEEE and Koushik Maharatna, Member, IEEE
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS-I: REGULAR PAPERS 2009.
http://www3.ntu.edu.sg/home/aspkmeher/papers/CORDIC-TUT-TACS-I.pdf
2. Harvard‘s Departamento of Astronomy, Smithsonian Astrophysical Observatory and NASA Astrophysics Data System
http://adsabs.harvard.edu/abs/2010GeCar..36..160Z
3. Donaldas Zanevičius
h – Geometry. Neo-sines in mechanics. 2008 Vilnius.Lithuania.
4. Merrill I. Skolnik RADAR HANDBOOK Editor in Chief Third Edition